Cette présentation générale s'appuie principalement sur les articles [BOSM96] et [POGG89].
Supposons que l'on veuille étudier un phénomène physique
donné. L'état de ce phénomène peut être représenté par une série de
grandeurs, que l'on peut regrouper dans un vecteur appelé vecteur de
sortie, et noté  .
Cet état dépend de plusieurs paramètres extérieurs, que l'on peut
regrouper dans un autre vecteur, appelé vecteur d'entrée, et noté
.
Cet état dépend de plusieurs paramètres extérieurs, que l'on peut
regrouper dans un autre vecteur, appelé vecteur d'entrée, et noté
 .
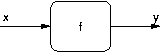
On supposera que le phénomène n'a pas de mémoire, c'est à dire
que sa sortie
à un instant donné ne dépend que de son entrée
à ce même instant et non pas des entrées précédentes. Dans ce cas on
peut représenter le phénomène physique comme une fonction (
.
On supposera que le phénomène n'a pas de mémoire, c'est à dire
que sa sortie
à un instant donné ne dépend que de son entrée
à ce même instant et non pas des entrées précédentes. Dans ce cas on
peut représenter le phénomène physique comme une fonction ( )
et sous forme d'un schéma-bloc :
)
et sous forme d'un schéma-bloc :
Si l'on ne sait pas modéliser précisément le phénomène
physique mais que l'on aimerait disposer d'une simulation, on
peut recourir à l'approximation de fonction. Le but est de créer une
nouvelle fonction,  ,
que l'on connaît parfaitement et qui représentera au mieux possible
la fonction
,
que l'on connaît parfaitement et qui représentera au mieux possible
la fonction  .
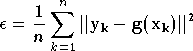
On définit une mesure de l'écart entre les deux fonctions, que
l'on appelle
performance[5]. La performance la plus utilisée est
l'erreur quadratique :
.
On définit une mesure de l'écart entre les deux fonctions, que
l'on appelle
performance[5]. La performance la plus utilisée est
l'erreur quadratique :

N'ayant pas accès à la fonction
,
cette performance ne pourra pas être calculée. Par contre on dispose
d'un jeu de mesures du phénomène physique que l'on peut
représenter par une série de couples  .
Dans ce cas il est possible de calculer une performance approchée, avec
ces couples de mesures. Pour l'erreur quadratique, il s'agit de
l'erreur quadratique moyenne :
.
Dans ce cas il est possible de calculer une performance approchée, avec
ces couples de mesures. Pour l'erreur quadratique, il s'agit de
l'erreur quadratique moyenne :
L'approximation de fonction sera faite à l'aide de ce jeu
de mesures, et l'on cherchera la fonction
qui minimise la fonction de performance
 .
.
La fonction
doit vérifier certaines propriétés pour être approximée. Un exemple
intéressant est donné dans [BOSM96] : supposons que
soit le
répertoire téléphonique, qui associe un numéro de téléphone
au nom du propriétaire .
On peut disposer du répertoire téléphonique d'une ville, qui
correspond à un jeu de mesures  .
Même si l'on trouve une fonction
qui approxime parfaitement ,
c'est à dire qui a une erreur quadratique moyenne nulle sur le jeu
de mesures, l'approximation ne pourra pas donner le numéro de
téléphone d'un nouvel arrivant en ville. Ceci est tout simplement dû
au fait que la fonction
n'est pas continue, et que le numéro de téléphone correspondant à un
nom donné ne donne aucune information sur les numéros des noms voisins.
.
Même si l'on trouve une fonction
qui approxime parfaitement ,
c'est à dire qui a une erreur quadratique moyenne nulle sur le jeu
de mesures, l'approximation ne pourra pas donner le numéro de
téléphone d'un nouvel arrivant en ville. Ceci est tout simplement dû
au fait que la fonction
n'est pas continue, et que le numéro de téléphone correspondant à un
nom donné ne donne aucune information sur les numéros des noms voisins.
Plus généralement, un algorithme d'approximation a besoin que
pour deux entrées voisines  et
et  les sorties correspondantes
les sorties correspondantes  et
et  soient également voisines. Les fonctions respectant cette propriété sont
appelées
fonctions douces ("smooth functions" en Anglais). "Fonction
douce" est une notion relative, mais une définition simple que
l'on peut retenir et qui suffit généralement est une fonction
dérivable par morceaux et de dérivée bornée. Fort heureusement la très
grande majorité des fonctions représentant des phénomènes physiques
respecte cette propriété en pratique.
soient également voisines. Les fonctions respectant cette propriété sont
appelées
fonctions douces ("smooth functions" en Anglais). "Fonction
douce" est une notion relative, mais une définition simple que
l'on peut retenir et qui suffit généralement est une fonction
dérivable par morceaux et de dérivée bornée. Fort heureusement la très
grande majorité des fonctions représentant des phénomènes physiques
respecte cette propriété en pratique.
Une seconde condition porte sur le choix du jeu de données qui
servira à réaliser l'approximation. Celui-ci doit être représentatif
des évolutions de la fonction .
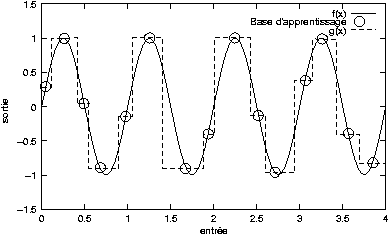
Si l'on choisit le cas simple où l'on veut approximer une
fonction à une dimension, sinusoïdale, et si les exemples choisis sont
espacés de  ,
on remarque sur la figure 2.3
qu'une droite passant par les exemples peut être considérée comme
une bonne approximation par l'algorithme :
,
on remarque sur la figure 2.3
qu'une droite passant par les exemples peut être considérée comme
une bonne approximation par l'algorithme :
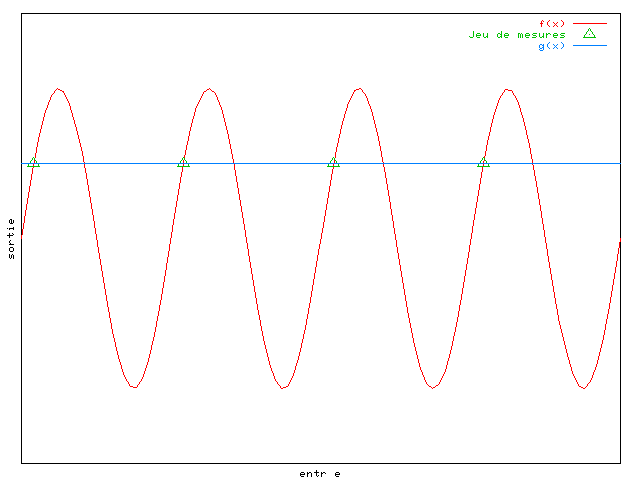
En effet avec ce jeu de données,
l'erreur quadratique moyenne est nulle, alors que la fonction
n'est pas une bonne approximation de la sinusoïde dans l'absolu.
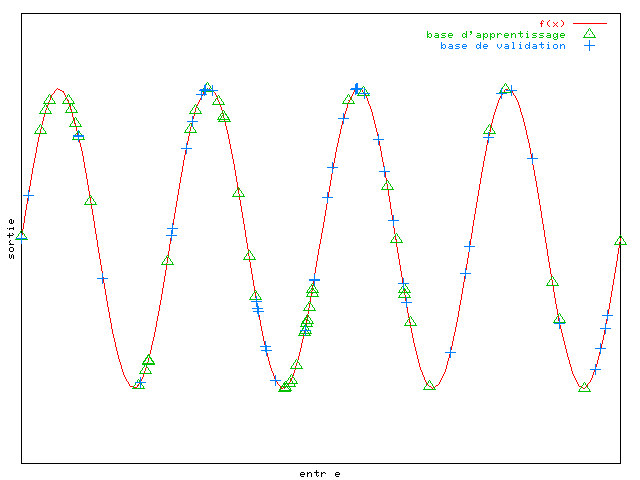
Pour détecter ces anomalies, il est fréquent de définir deux jeux de
données. Le premier, appelé
base d'apprentissage, contient les données qui serviront à
déterminer la fonction .
Le second, appelé
base de validation, est distinct du premier, et servira simplement à
vérifier que l'approximation se déroule correctement. Deux
performances sont
calculées,  avec la base d'apprentissage et
avec la base d'apprentissage et  avec la base de validation. On cherche à minimiser
et on surveille l'évolution de .
Si un écart important est constaté entre les deux performances, ceci
veut dire que l'approximation n'est pas bonne, et une cause
possible est un mauvais choix de la base d'apprentissage.
avec la base de validation. On cherche à minimiser
et on surveille l'évolution de .
Si un écart important est constaté entre les deux performances, ceci
veut dire que l'approximation n'est pas bonne, et une cause
possible est un mauvais choix de la base d'apprentissage.
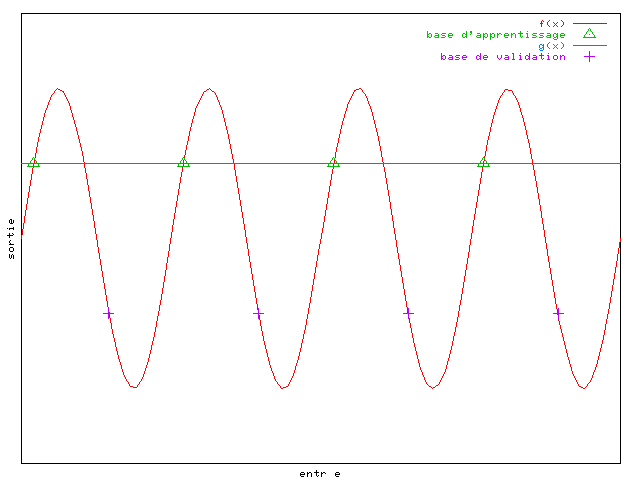
Dans l'exemple ci-dessus, avec une base de validation décalée
de  par rapport à la base d'apprentissage, on remarque un
nul, avec un
par rapport à la base d'apprentissage, on remarque un
nul, avec un  élevé, ce qui est révélateur d'une base non adaptée au problème.
Malheureusement il n'existe pas de critère général permettant de
dire si la base d'apprentissage est bien choisie. Il est nécessaire
de connaître un peu le système que l'on veut approximer, et faire
quelques tests pour déterminer si le jeu de données est pertinent ou
non. Dans la plupart des cas, une base constituée de vecteurs
sélectionnés aléatoirement donne de bons résultats, mais le choix de la
taille de la base est toujours délicat, et dépend autant de la fonction
à approximer que de la méthode utilisée pour l'approximation. Par
exemple pour la sinusoïde une telle base pourrait convenir :
élevé, ce qui est révélateur d'une base non adaptée au problème.
Malheureusement il n'existe pas de critère général permettant de
dire si la base d'apprentissage est bien choisie. Il est nécessaire
de connaître un peu le système que l'on veut approximer, et faire
quelques tests pour déterminer si le jeu de données est pertinent ou
non. Dans la plupart des cas, une base constituée de vecteurs
sélectionnés aléatoirement donne de bons résultats, mais le choix de la
taille de la base est toujours délicat, et dépend autant de la fonction
à approximer que de la méthode utilisée pour l'approximation. Par
exemple pour la sinusoïde une telle base pourrait convenir :
Il existe de nombreuses méthodes d'approximation déterminant
une fonction
qui approxime dans certaines conditions la fonction
.
En pratique il n'est pas possible d'avoir un système générique,
capable de créer une fonction
de n'importe quelle forme, et donc ces méthodes se limitent à une
famille de fonctions
possibles. Par exemple on peut envisager d'utiliser la famille des
fonctions polynomiales de degré 3. On peut représenter cette famille par
 où
est toujours l'entrée de la fonction, et
où
est toujours l'entrée de la fonction, et
 est un vecteur paramètre, qui caractérise la fonction choisie dans la
famille. Dans l'exemple de la famille des fonctions polynomiales de
degré 3, le vecteur
sera l'ensemble des coefficients du polynôme.
est un vecteur paramètre, qui caractérise la fonction choisie dans la
famille. Dans l'exemple de la famille des fonctions polynomiales de
degré 3, le vecteur
sera l'ensemble des coefficients du polynôme.
Finalement, une fois la famille choisie, le problème de
l'approximation devient un problème d'optimisation numérique. En effet il
se réduit à trouver le vecteur de paramètres
qui minimise :
où
 est le nombre d'éléments dans la base d'apprentissage
.
Le nombre de paramètres (la dimension du vecteur
)
est le nombre de
degrés de liberté de l'algorithme qui va déterminer la meilleure
approximation. Plus ce nombre est grand, plus il sera possible de
réaliser des fonctions différentes, et donc plus il sera possible
d'approcher la fonction .
Par contre avec un nombre de degrés de liberté plus faible, la recherche
de l'approximation demande moins de calcul.
est le nombre d'éléments dans la base d'apprentissage
.
Le nombre de paramètres (la dimension du vecteur
)
est le nombre de
degrés de liberté de l'algorithme qui va déterminer la meilleure
approximation. Plus ce nombre est grand, plus il sera possible de
réaliser des fonctions différentes, et donc plus il sera possible
d'approcher la fonction .
Par contre avec un nombre de degrés de liberté plus faible, la recherche
de l'approximation demande moins de calcul.
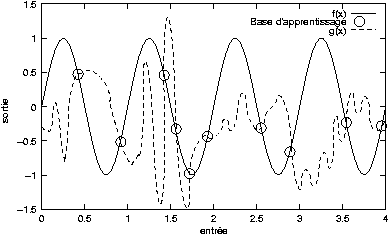
De plus si le nombre de degrés de liberté est trop élevé, un autre
problème survient, celui du
surapprentissage, ou apprentissage par coeur. La fonction
obtenue est plus complexe que la fonction d'origine, et est
parfaitement égale à celle-ci aux points définis par les exemples
fournis. Mais  ne généralise
pas correctement, c'est à dire que les deux fonctions diffèrent
beaucoup entre les points définis par la base d'apprentissage. Un
exemple de ce phénomène de surapprentissage est illustré par la figure
2.6 :
ne généralise
pas correctement, c'est à dire que les deux fonctions diffèrent
beaucoup entre les points définis par la base d'apprentissage. Un
exemple de ce phénomène de surapprentissage est illustré par la figure
2.6 :
Dans ce cas également le surapprentissage peut être détecté en
définissant une seconde base, la base de validation, et en étudiant
l'évolution de la performance sur cette seconde base. Pour éviter ce
problème il faut limiter le nombre de degrés de liberté (tout en
garantissant que les fonctions
pourront être assez complexes pour approximer correctement ) et
augmenter la taille de la base d'apprentissage.
Avant de présenter les techniques neuronales pour l'approximation de fonction, qui sont l'objet principal de ce chapitre, nous présenterons brièvement quelques méthodes classiques d'approximation.
Le but n'est pas d'énumérer toutes les méthodes d'approximation de fonctions, mais simplement d'en citer quelques unes, utilisant une approche paramétrique. Leur point commun est de dépendre d'un vecteur de paramètres, et la méthode consiste à trouver le vecteur paramètre permettant de trouver la meilleure approximation possible.
Une première méthode est celle des moindres carrés. On choisit une famille
simple de fonctions qui dépendent du vecteur paramètre
,
et on détermine le minimum de la fonction d'erreur quadratique moyenne :
Ce minimum est déterminé en cherchant
l'extremum de cette fonction, c'est-à-dire le vecteur
pour lequel toutes les
dérivées partielles s'annulent :
où  est la
est la  composante de ,
et
composante de ,
et  est le nombre de paramètres (c'est à dire la dimension de
).
On doit donc résoudre le système d'équations suivant :
est le nombre de paramètres (c'est à dire la dimension de
).
On doit donc résoudre le système d'équations suivant :

L'application principale de cette méthode est la régression linéaire. Dans ce cas l'expression des fonctions
où
est la dimension de
est la
composante de
où
est la
.
La méthode des moindres carrés est assez simple à mettre en place.
Cependant elle n'est efficace qu'avec des familles de fonctions
simples, c'est à dire telles que la fonction de performance
 ne présente qu'un seul extremum. Il est donc difficile
d'appliquer cette méthode à des fonctions plus complexes, comme
certains polynômes. De plus elle nécessite de connaître des informations
a priori sur la forme de
pour déterminer une famille de fonctions adaptée.
ne présente qu'un seul extremum. Il est donc difficile
d'appliquer cette méthode à des fonctions plus complexes, comme
certains polynômes. De plus elle nécessite de connaître des informations
a priori sur la forme de
pour déterminer une famille de fonctions adaptée.
D'autres méthodes qui nécessitent moins de connaissances sur la fonction réelle réalisent des approximations locales. L'espace d'entrée est découpé en zones, et sur chaque zone la fonction est approximée par une fonction simple. L'utilisation la plus simple de cette méthode est l'approximation localement constante, dans laquelle chaque zone est approximée par une constante. En dimension 1, ceci donne des fonctions en escalier :
Pour avoir des modèles plus fins il est possible de choisir des fonctions légèrement plus complexes, comme les polynômes. Dans la méthode dite des splines [BOOR78], des polynômes de degré fixe (3 en général, mais des applications existent également avec des degrés 4,5 voire 6) permettent de réaliser des approximations plus fines et de garantir la continuité de l'approximation lors du passage d'une zone à l'autre. Ces méthodes sont très efficaces, mais le choix du nombre de zones et de leurs découpages dépend de l'application et peut s'avérer délicat.
Enfin la méthode
"projection pursuit" [FRIE81]
approxime la fonction
par une somme de fonctions unidimensionnelles. Le vecteur d'entrée
subit une série de projections linéaires, chaque projection est fournie
à une fonction, et les valeurs des fonctions sont sommées.
L'expression de la fonction
est la suivante :

où  sont des fonctions de base de l'approximation,
sont des fonctions de base de l'approximation,
 est le nombre de fonctions de base à utiliser, et
est le nombre de fonctions de base à utiliser, et
 sont les paramètres ajustables.
doit être précisé manuellement, et dépend de la complexité de la
fonction à approximer. Ensuite les paramètres
sont ajustés par un algorithme d'apprentissage. On peut montrer que
cette méthode est capable d'approximer n'importe quelle fonction
douce, pourvu que l'on choisit un
assez grand. En pratique on constate de bonnes performances même avec
des
faibles, en particulier dans les cas où de la redondance est présente
dans l'espace d'entrée, c'est-à-dire lorsque tous les
vecteurs
utilisés n'occupent qu'un sous-espace de l'espace
d'entrée (par exemple un plan dans un espace à 3 dimensions).
Cependant les paramètres
sont difficiles à optimiser et les algorithmes d'apprentissage
demandent beaucoup de calcul, sans garantir de trouver la solution
optimale.
sont les paramètres ajustables.
doit être précisé manuellement, et dépend de la complexité de la
fonction à approximer. Ensuite les paramètres
sont ajustés par un algorithme d'apprentissage. On peut montrer que
cette méthode est capable d'approximer n'importe quelle fonction
douce, pourvu que l'on choisit un
assez grand. En pratique on constate de bonnes performances même avec
des
faibles, en particulier dans les cas où de la redondance est présente
dans l'espace d'entrée, c'est-à-dire lorsque tous les
vecteurs
utilisés n'occupent qu'un sous-espace de l'espace
d'entrée (par exemple un plan dans un espace à 3 dimensions).
Cependant les paramètres
sont difficiles à optimiser et les algorithmes d'apprentissage
demandent beaucoup de calcul, sans garantir de trouver la solution
optimale.
[5] dans la littérature, le critère qu'on appelle ici "performance" est de temps en temps appelé "erreur". Dans ce mémoire, on appellera "erreur" la différence entre la sortie fournie par le réseau et la sortie voulue pour un exemple particulier, et "performance" le critère qui représente la qualité de l'approximation, basé sur l'erreur. L'erreur quadratique moyenne est une performance que l'on calcule en réalisant la moyenne des carrés des erreurs sur toute la base.